Quiet Drones 2022 - Paris
27/06/2022
Éric Bavu(1), Hadrien Pujol(1), Alexandre Garcia(1), Christophe Langrenne(1),
Sébastien Hengy(2), Oussama Rassy(2),
Nicolas Thome(3), Yannis Karmim(3),
Stéphane Schertzer(2), Alexis Matwyschuk(2)
A deep-learning-based multimodal approach for aerial drone detection and localization
Project partners
Funding

protection against the illicit use of aerial drones
network of audio and video sensors
Microphone arrays
optronic system
Localization and detection
3D Audio
audio/video
Deep Learning
Automatic video tracking
Modular network of sensors
Installation examples
independent and compact deep-learning processors
AI-enhanced microphone array
Real-time drone localization
using Deep Learning audio
- ≈ 15 hectares / array
- 40 estim. / sec / array
- Latency < 20 ms
Absolute 3D angular error < 4°
Simultaneous recognition of the drone model
- Acoustic signature recognition
- multitask A.I. (localization + recognition)
- Rate : 40 estim./ sec / array
Detection rate > 95% / Recognition rate > 85%
Innovative A.I. training using 3D ambisonics spatialization
Innovative A.I. training using 3D ambisonics spatialization
Innovative A.I. training using 3D ambisonics spatialization
Innovative A.I. training using 3D ambisonics spatialization
Innovative A.I. training using 3D ambisonics spatialization
3D Spatializer
- Restitution and modification of 3D drone trajectories
- Rotation of audio scenes
- Real time soundfield synthesis
- Automatic labeling
- Simplified inclusion of new drones to the dataset
Ambisonic synthesis process

Signal :
- Several arrays on sites
- 19 or 50 microphones / array
- > 55 h of recordings time (800 Go)
- Samplerate: 48000 Hz

Ambisonic synthesis process
Position :
- GPS RTK for drone g.t. positions
- Orientation and position
- Samplerate > 5 Hz

Ambisonic synthesis process
Spatialization :
- Calibrated Ambisonics system
- Order 5 ambisonics
- Real time control
- Automated recording

Deep neural network for audio
localization and recognition : BeamLearning-ID
Localization results : azimuth - Testing flight
Localization results : elevation - Testing flight
Absolute 3D angular error - Testing flight
Localization performances : statistics
Drone recognition performances : statistics
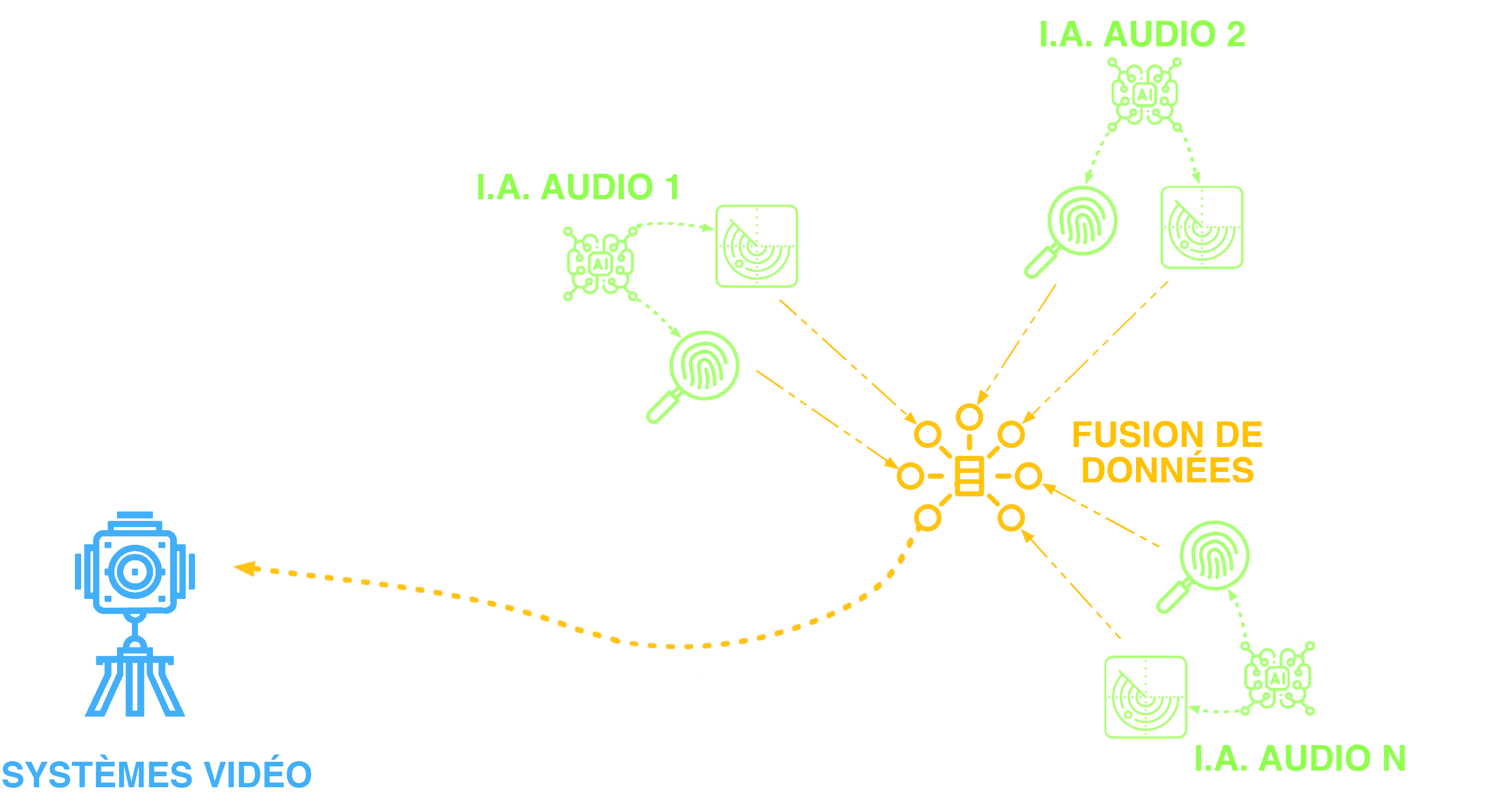
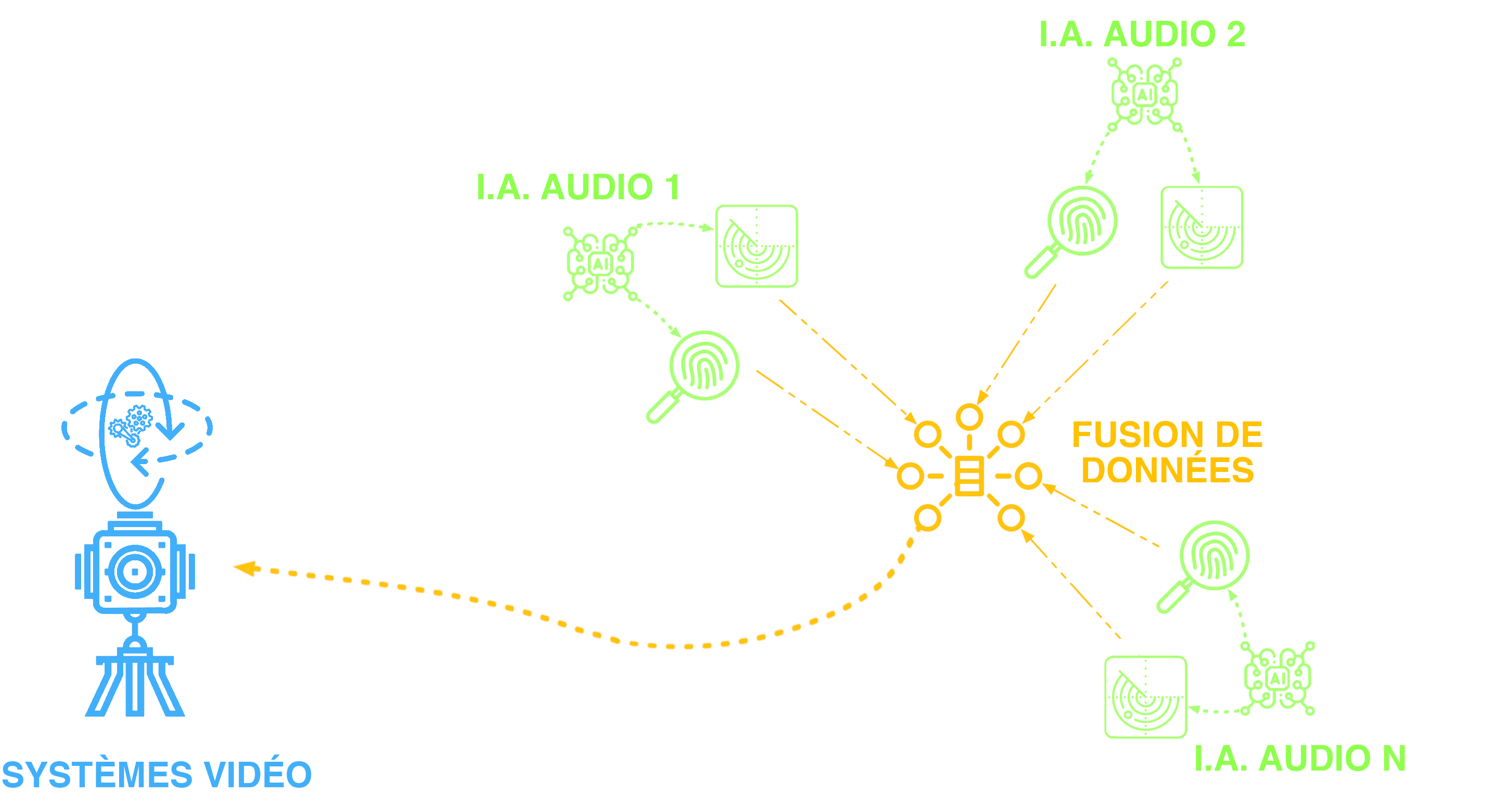
Data fusion :
automatic orientation of video systems

Data fusion :
automatic orientation of video systems
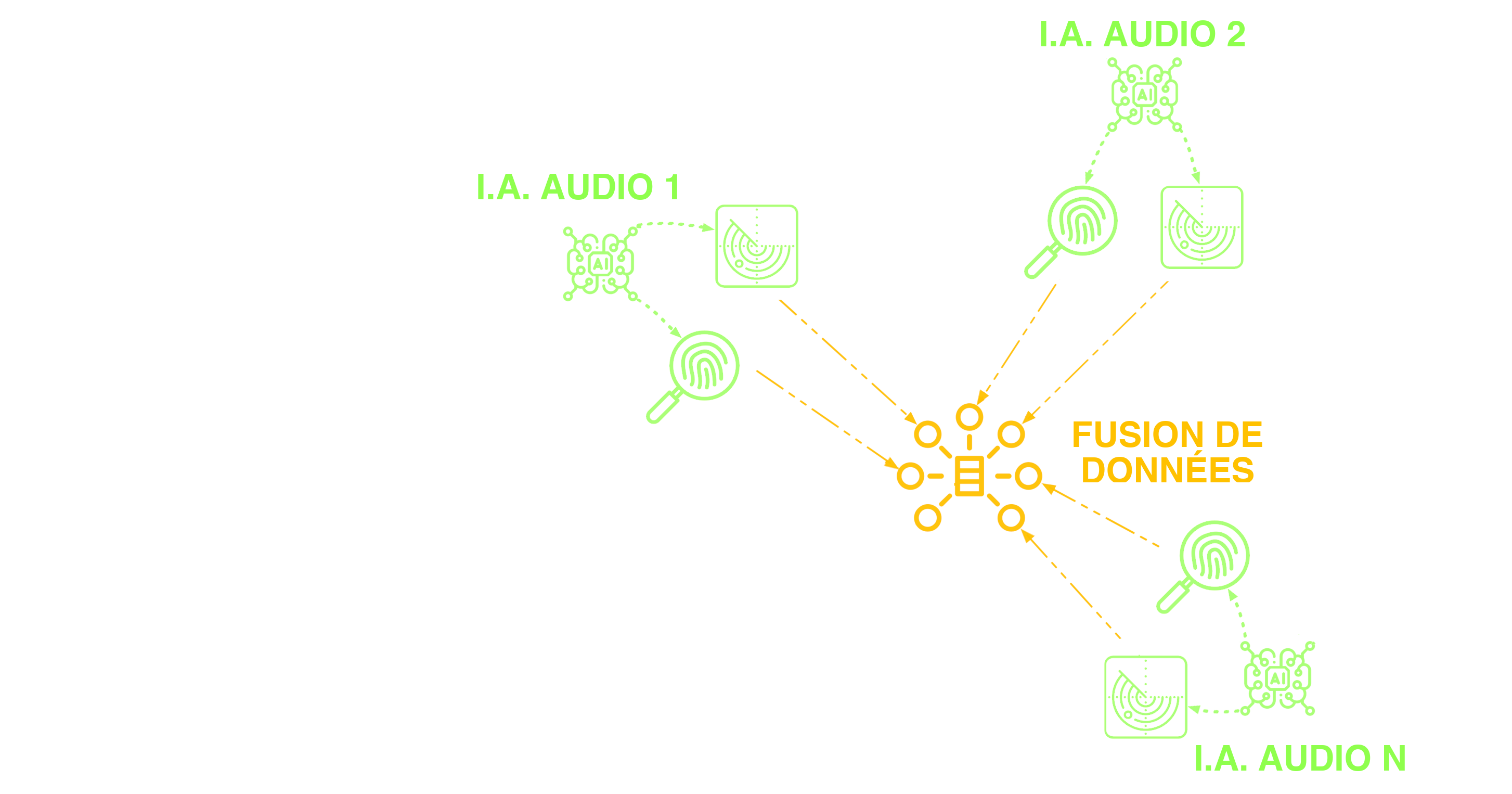
Data fusion :
automatic orientation of video systems
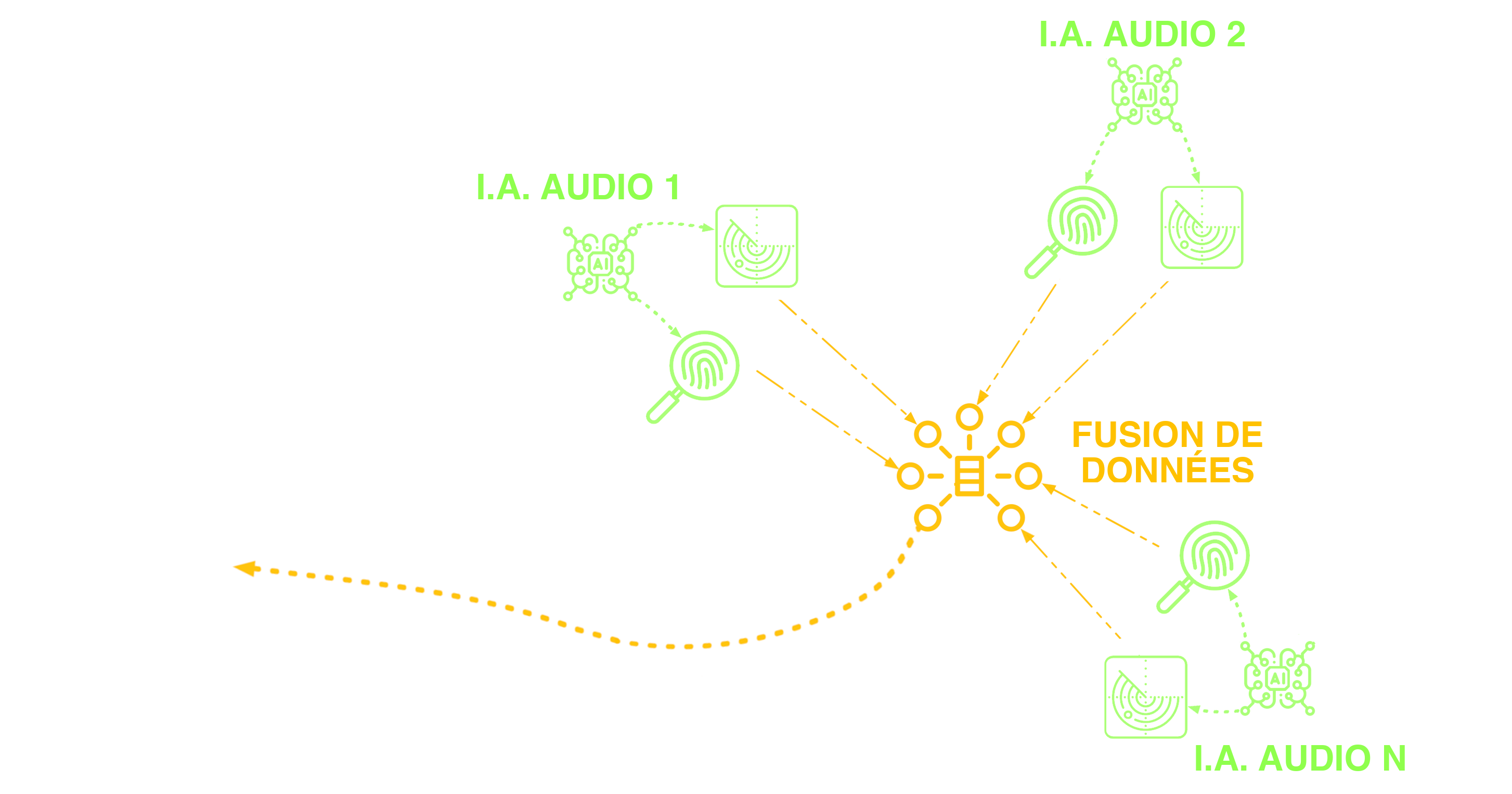
Data fusion :
automatic orientation of video systems
Data fusion :
automatic orientation of video systems
Data fusion :
automatic orientation of video systems
Data fusion :
automatic orientation of video systems
Data fusion :
automatic orientation of video systems
• Automation of cameras : visible, thermal and active imaging
Complementary optronic systems
Complementary optronic systems
• Night / Day / Smoke
• Active imaging SWIR : background removal
in difficult situations
Realtime drone Tracking and recognition using video deep learning
Scan me !
