Acoustic localization and detection of UAVs
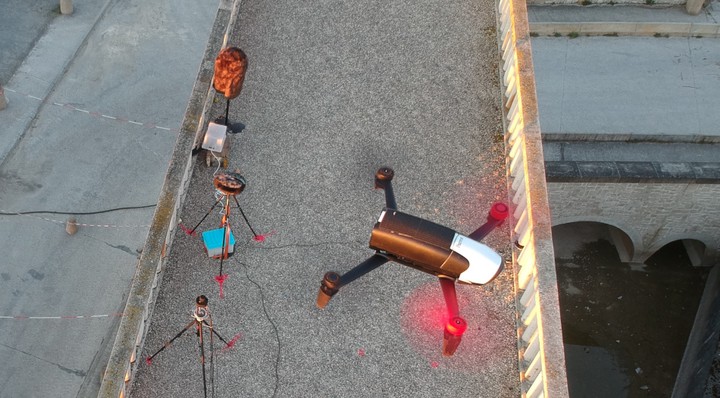 Drone flying over a building equipped with microphonic arrays
Drone flying over a building equipped with microphonic arrays
Localization and acoustic detection of UAVs using compact MEMS microphonic arrays
Supervised PhD student : Aro Ramamonjy
Supervision: Éric Bavu , Alexandre Garcia , Sébastien Hengy ( ISL/APC Group )
Project duration : 3.5 years (2015 - 2018)
Funding : DGA grant and 50% of Institut Saint Louis funding
Abstract : This project is part studies related to the detection and localization of moving sound sources in complex environments, such as urban or noisy environments. Recent events have shown that the democratization of the commercialization of aerial and terrestrial drones, and their ability to carry increasingly heavy loads, has led to the emergence of new threats to sensitive infrastructures (power plants, sensitive buildings, personnel, …).
The ISL and the LMSCC have developed over the last years efficient methods for the localization of various types of sound sources, transient or stationary. These works constitute the starting point of this project, which aims at improving these localization methods, and at developing new compact microphonic arrays, optimized for this type of applications. The type of sound sources we wish to cover correspond to sources emitting at low sound levels and having the possibility to change their trajectory rapidly (type civilian drone).
Development of compact microphonic antennas based on digital MEMS
This project was first based on the thesis of Aro Ramamonjy (defense expected end of 2018), co-funded by the DGA and the ISL, which allowed the development of microphonic antennas composed of digital MEMS, with a scale not exceeding ten centimeters.

Figure : Microphone array prototypes based on digital MEMS developed in the framework of Aro Ramamonjy’s thesis.
The first prototype, composed of 13 digital MEMS distributed according to a logarithmic law, was developed in the laboratory in order to efficiently measure the pressure and the the particle velocity components over a large frequency band. A preliminary version of this device, transmitting the measured signals to a control PC via a USB2 serial link, has been validated for azimuth and elevation directional tracking of a UAV trajectory in the laboratory using an approach based on acoustic propagation models. A second prototype, composed of 32 digital MEMS distributed in 4 bundles of 8 channels transmitting microphonic data via Ethernet using the AVB protocol was also developed and tested during the measurement campaign on the ISL test field in Baldersheim, in June 2017.
Real-time localization of moving sources
The second part of this project developed in the framework of the thesis of [Aro Ramamonjy] (http://www.lmssc.cnam.fr/fr/equipe/aro-ramamonjy) concerns the development of algorithms for the localization of moving sources, with a strong constraint consisting in a real time evaluation of the source position. For this purpose, we have developed algorithms exploiting the topology of the developed differential antenna, in order to estimate precisely the pressure and the horizontal components of the particle velocity of the acoustic wave emitted by the moving source. These components are then used to estimate the azimuth and elevation of the source in real time, using a RANSAC algorithm from the temporal data (fit in pressure/velocity space to estimate the angular position every 100 ms).
Video : Real-time estimation of sound pressure and particle velocity components in the horizontal plane, brought back to the center of the antenna. These data contain all the necessary information on the position of the source, provided that they are represented in a well-chosen 3D space (right).
Vidéo : Real-time estimation of the UAV position using the data presented in the previous video. The inverse problem is solved in real time, and the position estimation is displayed at a rate of about 10 frames per second.
In the framework of his thesis, Aro Ramamonjy was also interested in the problem of locating multiple sources, and proposed an iterative approach based on a histogram of probability of presence:

Figure : Histogrammes de localisation pour localiser itérativement N sources.
UAV sound signature recognition
The last part of Aro Ramamonjy’s thesis concerns the detection and recognition of drones. For this, he used a decision tree classification technique “Repeated Incremental Pruning to Produce Error Reduction” (JRip) to efficiently detect the presence of drones, from a database recorded during 3 days on the Baldersheim test field. This method, combined with a spatial filtering, leads to good detection performances.

Figure : JRip drone detection: False negative and false positive rates in the drone detection task, for several signal-to-noise ratios.
Publications and communications related to the project
-
A Ramamonjy, É. Bavu, A. Garcia, A., S. Hengy., Détection et suivi acoustique de drones miniatures, Forum Innovation Défense 2018, Paris, Nov 2018
-
A. Ramamonjy, É. Bavu, S. Hengy. Source localization & identification with a compact array of digital MEMS microphones., 6th Workshop on Battlefield Acoustics, Saint Louis, France, October 2018.
-
A. Ramamonjy, É. Bavu, A. Garcia, S. Hengy. Source Localization and Identification with a compact array of digital MEMS microphones. _Proceedings of 25th International Congress on Sound and Vibration, Hiroshima, JAPAN, Jul 2018.
-
A. Ramamonjy, É. Bavu, A. Garcia, S. Hengy. A distributed network of compact microphone arrays for drone detection and tracking. Acoustics’17, Boston, Massachusetts, USA, Jun 2017. doi
-
A. Ramamonjy, É. Bavu, A. Garcia, S. Hengy. Détection, classification et suivi de trajectoire de sources acoustiques par captation pression-vitesse sur capteurs MEMS numériques, Actes du 13ème Congrès Français d’Acoustique joint avec le 20ème colloque VIbrations, SHocks and NOise, CFA/VISHNO 2016, Le Mans, Apr 2016.
-
A. Ramamonjy, É. Bavu, A. Garcia, S. Hengy. Noise reduction on a compact microphone array, application to drone detection. 5th Workshop on Battlefield Acoustics, Saint Louis, France, Oct 2016.
-
A. Ramamonjy, É. Bavu, A. Garcia, S. Hengy. Source localization using a compact differential microphone array, application to drone tracking. 5th Workshop on Battlefield Acoustics, Saint Louis, France, Oct 2016.
-
A. Ramamonjy, Localisation angulaire de sources acoustiques. Application au suivi de drones aériens. Mémoire de Master Recherche ATIAM : Acoustique, Traitement du signal, Informatique Appliqués à la Musique, Jul 2015
Éric Bavu
Full Professor
My research interests include Deep Learning in acoustics, inverse problems in time domain, and acoustic source localization.